1. GAIL 概念介绍
假如需要从一个示例的专家数据中学习出一个策略,而且学习过程中没有专家的指导和信号预测。一种方是行为克隆方法,主要是通过监督学习模型从专家数据中学习出策略,但是这种方法需要大量数据。另一种方法是通过逆强化学习从专家数据中学习代价函数,该代价函数从专家的角度而言是唯一最优的,但是这种方法不直接而且比较慢,通常需要强化学习在内循环。为什么不可以直接从专家数据中学习出一个策略呢?
本文提出一种可以直接从专家数据中学习出策略的算法,称为 GAIL(Generative Adversarial Imitation Learning),生成对抗模仿学习。GAIL 实际上也运用了 GAN 的训练方法,来拟合状态数据和动作数据的分布,从而定义专家的行为。
2. 相关知识
2.1 符号定义
$\overline{\mathbb{R}}$ 定义为扩展的实数集:$\mathbb{R} \cup \{\infty\}$ 。
定义状态空间为 $\mathcal{S}$,动作空间为 $\mathcal{A}$,$\Pi$ 表示在状态空间 $\mathcal{S} $ 执行动作 $\mathcal{A} $ 的平稳随机策略集合。
状态转移概率定义为 $P(s’|s,a)$ 。
起始状态的分布写为 $p_0(s)$ 。
对于给定的策略 $\pi \in \Pi$,定义性能期望为:$\mathbb{E}_\pi[c(s,a)] \triangleq \mathbb{E}[\sum_{t=0}^\infty \gamma^t c(s_t,a_t)]$ 。
对于采样的轨迹样本,性能期望的符号表示为 $\hat{\mathbb{E}_\tau}$,专家策略表示为 $\pi_E$ 。
2.2 逆强化学习
本文后面采用了 maximum causal entropy (因果熵) IRL [1,2] ,它构造了一个优化问题:
其中 $c$ 表示 cost function,$\mathcal{C}$ 表示函数族,$H(\pi) \triangleq \mathbb{E}_\pi[-\log \pi(a|s)]$ 表示 $\gamma$ 折扣因果熵。
$\pi_E$ 实际上只是执行策略 $\pi_E$ 得到的一系列采样轨迹。因此 $\mathbb{E}_{\pi_E}$ 需要从这些样本中估计期望值。
最大化因果熵逆强化学习方法的目的是找到一个代价函数 $c \in \mathcal{C}$,使得对于专家策略,代价最低,而对于其他策略,代价很高。找到代价函数 $c$ 之后,从而通过强化学习过程估计专家策略:
3. 算法推导
首先研究 IRL 的表达能力。IRL 建立在庞大的代价函数族 $\mathbb{R}^{\mathcal{S} \times \mathcal{A}} = \{c:\mathcal{S} \times \mathcal{A} \rightarrow \mathbb{R}\}$ 上。由于拥有庞大的函数族,,对于固定的数据集很容易造成过拟合。因此本文引入一个凸的正则项 $\psi: \mathbb{R}^{\mathcal{S} \times \mathcal{A}} \rightarrow \overline{\mathbb{R}}$ 。加入正则项的最大因果熵 IRL 目标可以表示为:
令 $\tilde{c} \in IRL_\psi(\pi_E)$ ,现在我们感兴趣的是由 $RL(\tilde{c})$ 得出的策略的性能。
为了评估 $RL(\tilde{c})$,将原先优化问题转化为凸问题。首先定义策略 $\pi \in \Pi$ 的占有率(occupancy measure) $\rho_\pi: \mathcal{S} \times \mathcal{A} \rightarrow \mathbb{R}$ 为 $\rho_\pi(s,a) = \pi(a|s) \sum_{t=0}^\infty \gamma^t P(s_t=s|\pi)$ 。
占有率可以理解为状态动作对在策略 $\pi$ 执行下的概率分布。此时对于 $c(s,a)$,期望值的计算可以写为:$\mathbb{E}_\pi[c(s,a)]=\sum_{s,a} \rho_\pi(s,a)c(s,a)$ 。论文 [3] 中证明了占有率集合 $\mathcal{D} \triangleq \{\rho_\pi: \pi \in \Pi \}$ ,可以写成仿射约束的可行集:$\mathcal{D}=\left\{ \rho:\rho \ge 0 \;\; and \;\; \sum_a \rho(s,a)=\rho_0(s) + \gamma \sum_{s’,a} P(s’|s,a)\rho(s’,a) \;\; \forall s \in \mathcal{S} \right\}$ 。(PS:仿射变换就是线性变化加上一个平移)注意,$\Pi$ 和 $\mathcal{D}$ 是一一映射的。
命题 3.1:如果 $\rho \in \mathcal{D}$,那么 $\rho$ 是策略 $\pi_\rho \triangleq \rho(s,a)/\sum_{a’} \rho(s,a’)$ 的占有率,$\pi_{\rho}$ 也是唯一的占有率为 $\rho$ 的策略。
命题 3.2:$RL \circ IRL_\psi(\pi_E) = \arg \min_{\pi \in \Pi} -H(\pi)+\psi^*(\rho_\pi-\rho_{\pi_E})$
为了评估 $RL(\tilde{c})$,需要一个数学工具:共扼函数。对于函数 $f:\mathbb{R}^{\mathcal{S} \times \mathcal{A}} \rightarrow \overline{\mathbb{R}}$,它的共扼函数 $f^:\mathbb{R}^{\mathcal{S} \times \mathcal{A}} \rightarrow \overline{\mathbb{R}}$ 表示为$f^(x)=\sup_{y\in \mathbb{R}^{\mathcal{S} \times \mathcal{A}}} x^Ty -f(y) $ 。共扼函数一定是凸函数。
命题 3.1 出自论文 [4] 。命题 3.2 在本文的附录 A 有证明。
命题 3.2 告诉我们带有 $\psi$ 正则项的 IRL 在含蓄地寻找一个策略,其占有率接近专家策略,通过共扼函数 $\psi^*$ 来度量。本文接下来将会阐述采用不同的 $\psi$ 设置,将会导致不同的模仿学习方法。
3.1 constant function $\psi$
最特殊的情况是 $\psi$ 是一个常数(也就是不采用正则项)。
引理 3.1:令 $\bar{H}(\rho) = -\sum_{s,a}\rho(s,a) \log \left( \rho(s,a)/\sum_{a’}\rho(s,a’) \right)$ 。 那么 $\bar{H}$ 是严格的凹函数,并且对于所有的 $\pi \in \Pi$ 和 $\rho \in \mathcal{D}$,都有 $H(\pi)=\bar{H}(\rho_\pi)$ 和 $\bar{H}(\rho)=H(\pi_\rho)$ 。
引理 1 在本文的附录 A 有证明。引理 3.1 告诉我们可以随意在策略和占有率两者间切换,因此得到下面引理。
引理 3.2:如果令 $L(\pi,c)=-H(\pi)+\mathbb{E}_\pi[c(s,a)]$,令 $\bar{L}(\rho,c)=-\bar{H}(\rho)+\sum_{s,a}\rho(s,a)c(s,a)$ 。那么对于所有的代价函数 $c$,都有 $L(\pi,c) = \bar{L}(\rho_\pi,c) \;\; \forall \pi \in \Pi$ ,并且都有 $\bar{L}(\rho,c)=L(\pi_\rho,c) \;\; \forall \rho \in \mathcal{D}$ 。
根据上面两条引理,可以得出以下推论:
推论 3.2.1:如果 $\psi$ 是一个常数,并且 $\tilde{c} \in IRL_\psi(\pi_E)$,$\tilde{\pi} \in RL(\tilde{c})$,那么 $\rho_{\tilde{\pi}}=\rho_{\pi_E}$ 。
以上推论告诉我们,如果不采用正则项,那么 $RL(\tilde{c})$ 得到的策略将完全与专家策略 $\pi_E$ 匹配。
推论 3.2.1 证明过程如下(涉及到最优化中的原问题和对偶问题):
定义 $\bar{L}(\rho,c) = -\bar{H}(\rho)+\sum_{s,a}c(s,a)(\rho(s,a)-\rho_E(s,a))$ 。给定 $\psi$ 是常数。
根据引理 3.2,可得:
以上问题的对偶问题如下:
因此 $\tilde{c}$ 是等式 $\eqref{5}$ 的对偶最优解。
引理 3.1 保证了 $-\bar{H}$ 是严格的凸函数,因此最优解是唯一的。原始问题的最优解可以通过对偶问题的最优解得到,即:
如果 $\tilde{\pi} \in RL(\tilde{c})$,根据引理 3.2,$\tilde{\pi}$ 的占有率 $\rho_{\tilde{\pi}} = \tilde{\rho} = \rho_E$ 。
从推论的结果,本文得出以下两条结论:
- IRL 是占有率匹配问题的一个对偶形式。
- 从占有率匹配对偶问题中导出的最优策略就是原始问题的最优策略。
3.2 occupancy measure matching
在上一节中,阐述了如果正则项是常数,则原问题相当于与专家数据进行状态动作数据占有率匹配的问题,也就是说占有率越与专家数据的占有率匹配,则推导出的策略越接近专家策略。但在实际运用中,占有率匹配算法实际是不可行的。因为专家轨迹数据的分布仅仅是一个有限样本的集合,在大规模环境中,很多数据不在专家数据集中,因此导致这些数据的占有率在专家数据集中为零。这回导致让学习出策略避开专家数据集中没有的状态动作对。
另外还有一个问题,占有率匹配的约束条件数量与定义域 $\mathcal{S} \times \mathcal{A}$ 的大小相同,这就导致在函数逼近的参数优化过程中产生大量的运算。
为了在大规模环境中运用模仿学习算法,松弛公式 $\eqref{5}$ 的形式,写成:
其中 $d_\psi(\rho_\pi,\rho_E)$ 定义为 $\rho_\pi$ 和 $\rho_E$ 两个占有率的正则项,即 $d_\psi(\rho_\pi,\rho_E) \triangleq \psi^*(\rho_\pi-\rho_E)$ ,与命题 3.2 的形式类似。
3.2.1 apprenticeship learning
学徒学习(apprenticeship learning)算法也是公式 $\eqref{7}$ 的一种特殊形式。令代价函数集合 $\mathcal{C} \subset \mathbb{R}^{\mathcal{S} \times \mathcal{A}}$,学徒学习算法的目标为:
接下来说明公式 $\eqref{8}$ 为什么属于是公式 $\eqref{7}$ 的形式。
定义一个指示函数 $\delta_\mathcal{C}: \mathbb{R}^{\mathcal{S}\times\mathcal{A}} \rightarrow \overline{\mathbb{R}}$,表达式为:
则公式 $\eqref{8}$ 可以写为如下形式:
因此学徒学习算法实际上采用的代价函数正则项为 $\psi = \delta_\mathcal{C}$,也就是将代价函数的范围限制在集合 $\mathcal{C}$ 中。带有熵正则项的学徒学习算法的目标可以写为:
对于集合 $\mathcal{C}$ 的形式,经典的学徒学习算法主要是将 $\mathcal{C}$ 限制子一个凸集中,该集合由一系列基函数进行线性组合得来:$f(s,a)=[f_1(s,a),\dots,f_d(s,a)]$。文中给出两种凸集:$\mathcal{C}_{linear}$ [5] 和 $\mathcal{C}_{convex}$[4] 。
3.2.2 学徒学习的优点
学徒学习采用了限制的代价函数范围 $\mathcal{C}$,因此能够将这样的 $\mathcal{C}$ 与策略函数逼近结合起来,运用到大规模的状态空间和动作空间中。比如论文 [6] 就将策略梯度公式和学徒学习的目标公式 $\eqref{8}$ 结合起来:
3.2.3 学徒学习的缺点
如果对 $\mathcal{C}$ 的限制过于严格,很有可能找不到和专家策略一样优秀的策略。因此对于基函数 $f_1,\dots,f_d$ 的设计需要十分精致。
4. GAIL 算法
正如前面所说的,如果正则项 $\psi$ 是常数,则对应的模仿学习算法可以与专家策略的占有率完全匹配,但是对于大规模的环境并不适用;如果正则项 $\psi$ 是线性函数类,如公式 $\eqref{11} $ ,则对应的模仿学习算法也许不能与专家策略的占有率完全匹配,但是可以适用于大规模的环境。
本文将提出新的正则器,结合以上两种正则器的优点:
注意到以上的代价函数的上界为零。公式 $\eqref{13} $ 的意义在于,代价函数对于专家轨迹的值如果是一个小的负数,则正则器给予一个很低的惩罚;如果是一个很大的值(即为零),则正则器给予一个很高的惩罚。
之所以采用这样的正则器,是因为从公式 $ \eqref{13}$ 中可以得到以下推论(证明过程在文中的附录):
其中判别器类别的范围是 $D:\mathcal{S \times \mathcal{A}} \rightarrow (0,1)$。现在我们的优化目标是:
公式 $\eqref{15}$ 将模仿学习算法和生成对抗网络建立了连接,$D$ 就是生成对抗模型中的判别器。$D$ 的任务就是负责识别生成器 $G$ 生成的数据分布和真实的数据分布的差异,当 $D$ 不再能辨别出差异时,$G$ 的任务就完成了。在公式 $\eqref{15}$ 中,$\rho_\pi$ 就相当于 $G$ 生成的数据分布,而 $\rho_E$ 就相当于真实数据分布。
首先引入 $\pi$ 和 $D$ 的函数逼近形式。定义一个策略网络 $\pi_\theta$ 和判别器网络 $D_w:\mathcal{S}\times \mathcal{A} \rightarrow (0,1)$。然后交替运用 Adam优化 $w$ 和运用TRPO 优化 $\theta$ 。
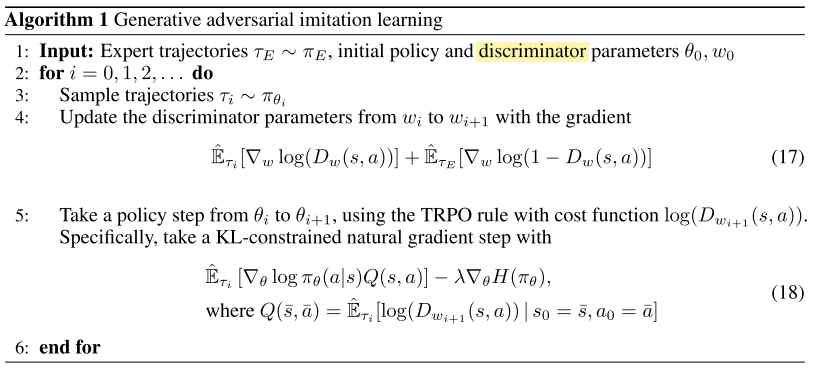
伪代码中对熵的求导如下:
参考文献
[1] B. D. Ziebart, A. Maas, J. A. Bagnell, and A. K. Dey. Maximum entropy inverse reinforcement learning. In AAAI, AAAI’08, 2008.
[2] B. D. Ziebart, J. A. Bagnell, and A. K. Dey. Modeling interaction via the principle of maximum causal entropy. In ICML, pages 1255–1262, 2010.
[3] M. L. Puterman. Markov decision processes: discrete stochastic dynamic programming. John Wiley & Sons, 2014.
[4] U. Syed, M. Bowling, and R. E. Schapire. Apprenticeship learning using linear programming. In Proceedings ofthe 25th International Conference on Machine Learning, pages 1032–1039, 2008.
[5] P. Abbeel and A. Y. Ng. Apprenticeship learning via inverse reinforcement learning. In Proceedings ofthe 21st International Conference on Machine Learning, 2004.
[6] J. Ho, J. K. Gupta, and S. Ermon. Model-free imitation learning with policy optimization. In Proceedings ofthe 33rd International Conference on Machine Learning, 2016.